Preprint on Filtering with Randomised Observations
Nazanin Abedini, Jana de Wiljes, and Svetlana Dubinkina have published a preprint on analysing filtering with partial observations.
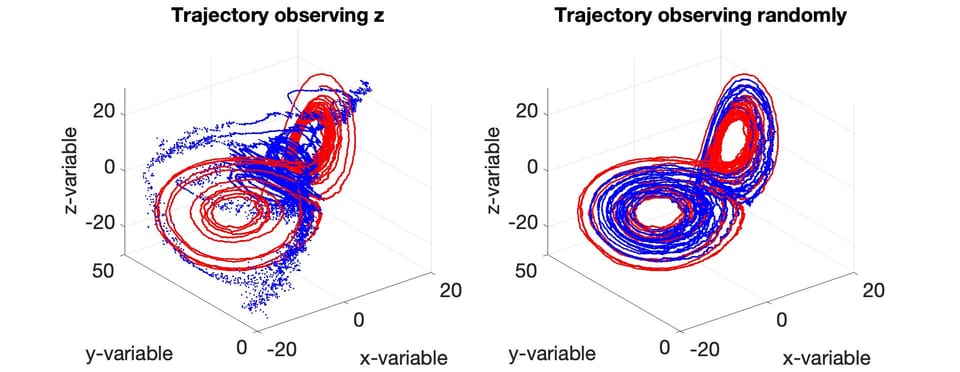
State estimation that combines observational data with mathematical models is central to many applications and is commonly addressed through filtering methods, such as ensemble Kalman filters. In this article, the authors examined the signal-tracking performance of a continuous ensemble Kalman filtering under fixed, randomised, and adaptively varying partial observations. Rigorous bounds are established for the expected signal-tracking error relative to the randomness of the observation operator. In addition, the group proposed a sequential learning scheme that adaptively determines the dimension of a state subspace sufficient to ensure bounded filtering error, by balancing observation complexity with estimation accuracy. Beyond error control, the adaptive scheme provides a systematic approach to identifying the appropriate size of the filter-relevant subspace of the underlying dynamics.